Rotor Design & Customization
The SatVector control system can be used for nearly any rotor that is powered with an Arduino and uses stepper motors. However, the SatVector software was designed with the SatNOGS rotor in mind and will work out of the box, provided no modifications were made to the drive system. Visit the Software/Help section to see what minimal adjustments may be required for your own design or a drive-modified SatNOGS rotor.
If you choose to use the SatNOGS rotor design for your ground station, there are a few minor modifications you can make. Aluminum shafts specified in the SatNOGS BOM were replaced with 3D-printed ones, measured to precisely match the inner diameter (ID) of the 6008zz bearing, with a hollow core for pass-through of 3/4" PVC for antenna mounting.
Joining clips to connect the 2020 aluminum frames for the az and el modules were created by @dflemst.
All 3D-printed parts were made using PETG filament on an Bambu Labs A1 Mini. Additional .stl files for component mounting are provided at the SatVector Github.
Control System Hardware
The system is powered by an Arduino Nano ESP32, chosen for its built-in Bluetooth Low Energy capabilities, lower cost, and faster processing. Motion is driven by NEMA 17 stepper motors controlled via A4988 motor drivers, allowing for high precision on both azimuth and elevation axes.
Both Arduino Nano and A4988 drivers are mounted on solderless breakout boards for easy assembly, replacement, and wiring. The A4988 breakout board includes switches for micro-stepping, a capacitor to help buffer 12vdc motor power, and discrete logic & 3v-5.5v circuit power inputs.
To ensure field-readiness and minimize cable entanglement where possible, the unit is designed to run off a DeWalt form factor 20V battery mounted atop the rotor. However, any reliable 12VDC source providing at least 2A will work.
Component List (BOM)
All components used in the control system. Amazon links are affiliate-supported.
Hardware Configuration
Minimal configuration of hardware is required. Ensure that all three microstepping switches on the stepper motor expansion board are set to 1/high so your motor microsteps at 1/16. This is required for the math set within the Arduino sketch to determine steps per revolution.
Wiring the Controller Hardware
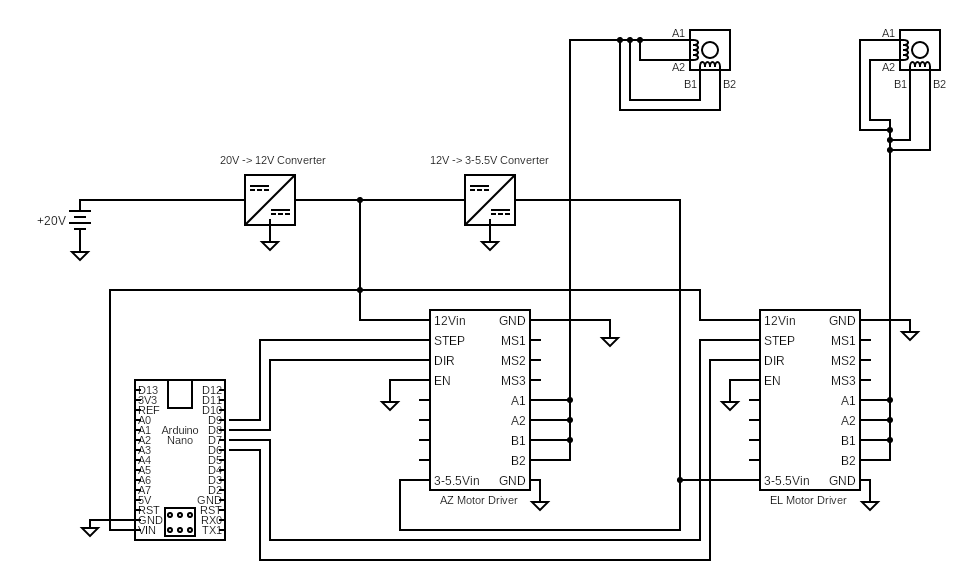
Wiring together the various components for the rotor hardware is pretty straight forward, however there are a few important notes about the schematic.
Circuit Notes
This schematic is provided as-is with no guarantees. It's up to you to review the manufacturer documentation supplied with each part to ensure you are connecting these devices as directed.
The ChoikWon transformer, shown as the 12V -> 3-5.5V Converter, is an adjustable voltage device. Before connecting to the A4988 circuitry, use a voltmeter to ensure the output is adjusted correctly, between 3-5.5V.
Wiring from the motor drivers' output to their respective stepper motors in the diagram is consolidated to a single line for visual simplicity only. Do not solder these wires into a single connection to the motor.
The pin-outs shown for the A4988 are not a direct translation to their position on the breakout board or the A4988 circuit itself. The driver expansion board is labeled to help you connect wires correctly.
MS1, MS2, MS3 are for micro-stepping. The A4988 breakout board has a switch for each; set each of these to "on" for full microstepping. This is integral to the math coded into the sketch and also prevents floating ground causing spurrious motor movement.